目次
Autono: ReAct-Based Highly Robust Autonomous Agent Framework
この論文は、適応的な意思決定と多エージェント協調を通じて複雑なタスクを解決するための、高い堅牢性を持つ自律エージェントフレームワーク「Autono」を提案しています。
この論文の特徴は、確率的ペナルティメカニズムを用いたタイムリーな放棄戦略により、エージェントが環境に応じて柔軟にタスクを放棄できることで、複雑な状況でも高い適応性と効率を実現する点です。

以下は、弊社AI開発ツール「IXV」を用いてこの論文を要約したものです。見出しや章立てが元論文とは異なる場合があります。
概要
この論文は、適応的意思決定と多エージェント協力を通じて複雑なタスクを解決するために設計された、ReActパラダイムに基づく非常に堅牢な自律エージェントフレームワークを提案しています。従来のフレームワークがLLMベースのプランナーによって生成される固定ワークフローに依存しているのに対し、このフレームワークは、エージェントの実行中に前の軌跡に基づいて次の行動を動的に生成することで堅牢性を高めています。
適応的な実行経路によって生じる可能性のある終了問題に対処するために、私は確率的ペナルティメカニズムを組み込んだタイムリーな放棄戦略を提案します。多エージェント協力のために、エージェント間で共有され、動的に更新されるメモリを可能にするメモリ転送メカニズムを導入しました。
このフレームワークの革新的なタイムリーな放棄戦略は、確率的ペナルティを介してタスク放棄の確率を動的に調整し、開発者がエージェントの実行戦略において保守的な傾向と探査的な傾向のバランスを取るためにハイパーパラメータを調整できるようにします。これにより、複雑な環境における適応性とタスク実行効率が大幅に向上します。さらに、エージェントは外部ツールの統合を通じて拡張でき、モジュラー設計とMCPプロトコルの互換性がサポートされているため、柔軟なアクションスペースの拡張が可能です。明示的な役割分担を通じて、多エージェント協力メカニズムはエージェントが特定のタスクコンポーネントに集中できるようにし、実行効率と品質を大幅に向上させます。
1. 序論
ReActパラダイムに基づく高い頑健性を持つ自律エージェントフレームワークを提案する。従来のLLMベースのプランナーによる固定ワークフローと異なり、このフレームワークはエージェント実行中に過去の軌跡に基づいて次のアクションを動的に生成し、頑健性を向上させる。適応的実行パスによる終了問題に対処するため、確率的ペナルティメカニズムを組み込んだタイムリーな放棄戦略を提案。エージェント間で共有・動的更新可能なメモリ転送メカニズムにより、マルチエージェント連携を実現している。
2. 関連研究
人工知能分野における言語モデルの進歩を概観。Transformerモデル、BERTモデル、chain-of-thought(CoT)プロンプティング、ReActパラダイム、マルチエージェント連携メカニズムなど。特にReActは推論とアクションを反復的に統合し、ハルシネーションを減少させ、タスク精度を向上させる。既存のフレームワーク(AutoGen、CrewAI、LangChain、Swarm、Magnetic-One)の限界も指摘。モデルコンテキストプロトコル(MCP)の標準化についても言及している。
3. 主要概念
フレームワークの二つの主要概念:Agent(エージェント)とTool(ツール)。エージェントは自律性、目標駆動性、拡張可能性、限定されたアクション空間、無限の状態空間、観察可能性、メモリ能力、制御可能な行動を持つ。ツールは記述的、パラメータ化可能、意味的フィードバックの特性を持ち、一般ツールとハンドオフツールに分けられる。ハンドオフツールはエージェント間のタスク引き渡しとメモリ転送を可能にする。
4. システム設計
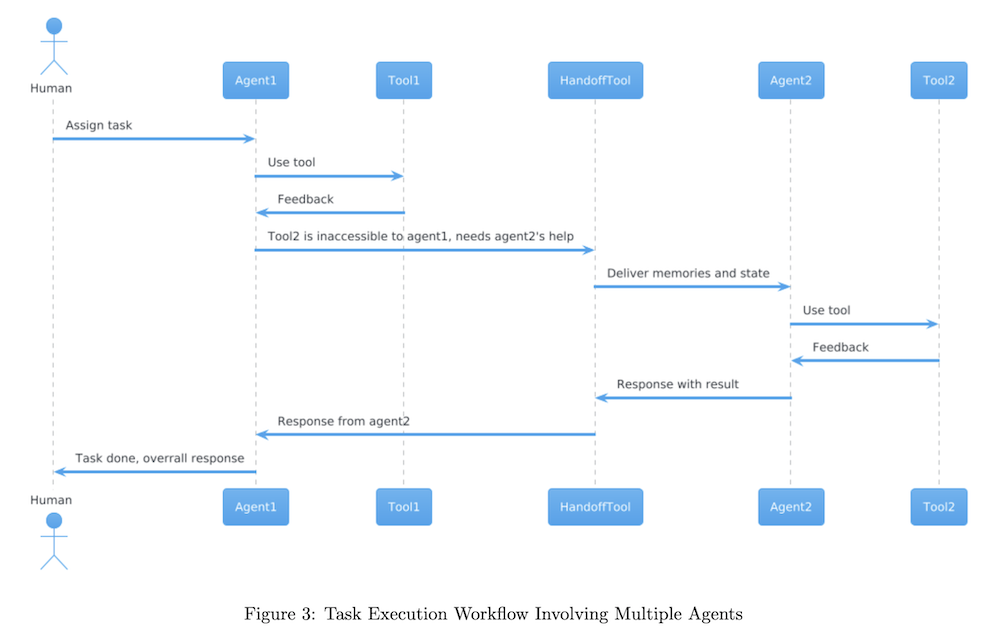
エージェントコンポーネントとして、思考エンジン、ツール、ステップ推定器、ペナルティ、メモリ、リクエストリゾルバ、次の移動スケジューラ、エグゼキュータ、内省がある。タスク実行ワークフローには、人間、エージェント、ツールの三者が関わる。マルチエージェントワークフローでは、エージェント1がツール1を使用し、解決できない部分タスクをハンドオフツールを通じてエージェント2に渡し、エージェント2がツール2で完了する流れを示している。
5. MCP互換性
MCPプロトコルとの互換性を確保するために、MCPツールアダプタとセッション管理メカニズムを設計・実装。ツールアダプタは、MCPで定義されたツールインターフェースをエージェントが直接呼び出せるツールにカプセル化する。クライアントは標準入出力、Server-Sent Events(SSE)、WebSocketに基づく複数のアダプタを実装し、セッション管理はエージェントとMCPサーバー間の効率的で信頼性の高い通信を確保する。
6. アルゴリズム
6.1 ReActベースのアクション戦略
エージェントの過去の軌跡と利用可能なツールセットに基づいて次の移動を動的に決定するアルゴリズム。関連イベント抽出、タスク完了状態の判定、ツールマッチング分析、次の動作推定、アクション実行と状態更新の主要ステップからなる。Chain-of-Thought(CoT)推論とツールマッチング分析によりエージェントの意思決定能力を向上させ、頑健なタスク実行を保証する。
6.2 タイムリーな放棄戦略
エージェントのタスク実行ステップを動的に制御し、非生産的または過度にリソースを消費するタスクを放棄できるアルゴリズム。放棄確率pとペナルティ係数βの2つのハイパーパラメータを導入。推定ステップを超えると確率的な意思決定フェーズに入り、継続すると放棄確率pにペナルティが適用され、後続のステップでの放棄可能性が増加する。
6.3 メモリ保存と共有メカニズム
マルチエージェント連携におけるメモリ保存と共有メカニズムは、情報同期と効果的な連携に不可欠。エージェントごとに順序付き辞書形式のメモリ保存構造を持ち、タイムスタンプ、エージェント識別子、アクション実行、アクション要約を含む。各アクション後に結果を新しいメモリとして記録し、次の移動を推定する際にメモリから軌跡と状態を取得。エージェント間のメモリ転送により、タスクコンテキストと蓄積された経験を共有可能。
7. 実験
7.1 実験結果と分析
3つのフレームワーク(autono、autogen、langchain)を複雑さの異なるタスクで評価。単一ステップタスクでは、autonoはGPT-4o-miniで96.7%、Qwen-plusとDeepSeek-v3で100%の成功率。マルチステップタスクでは、autonoはGPT-4o-miniとDeepSeek-v3で100%、Qwen-plusで96.7%の成功率。失敗可能性のあるマルチステップタスクでも、autonoはGPT-4o-miniで76.7%、Qwen-plusとDeepSeek-v3で93.3%の成功率を達成している。
7.2 実験結論
autonoはすべてのタスクタイプで優れたパフォーマンスを示し、特にマルチステップタスクと失敗可能性のあるマルチステップタスクで顕著。複雑なタスク処理における優れた適応性と頑健性を実証し、ReActベースのアクション戦略とタイムリーな放棄戦略の有効性を検証している。さまざまなモデルがautono内で高いパフォーマンスを発揮し、主流モデルとの優れた互換性を示している。
8. 結論と今後の課題
ReActパラダイムに基づく高い頑健性を持つ自律エージェントフレームワークを提案。過去の軌跡に基づく次のアクションの動的生成、タイムリーな放棄戦略、MCPプロトコルとの互換性が主な革新点。実験結果は、単一ステップ、マルチステップ、失敗可能性のあるマルチステップタスクにおいて高い成功率を達成。今後の課題として、タイムリーな放棄戦略の最適化、より効率的な通信と連携メカニズムの調査、リアルタイムタスクシナリオへの適用拡大、強化学習技術の統合によるエージェントの適応性と意思決定効率の向上が挙げられる。