目次
LLM-mediated Dynamic Plan Generation with a Multi-Agent Approach
この論文は、動的環境に適応できるネットワークを自動生成するために、大規模言語モデル(GPT-4o)を活用したマルチエージェントアプローチの計画手法を提案しています。
本論文の特徴は、環境の「ステータス」を基に適応可能なエージェントを自動生成し、柔軟性と一般性を兼ね備えたネットワークを構築する新しいアプローチを提案する点です。
論文:https://arxiv.org/abs/2504.01637

以下は、弊社AI開発ツール「IXV」を用いてこの論文を要約したものです。見出しや章立てが元論文とは異なる場合があります。
概要
動的環境に対して高い適応性を持つ計画手法は、自律的で多用途なロボットの開発にとって重要です。本研究では、大規模言語モデル(GPT-4o)を活用して、動的環境に適応可能なネットワークを自動生成する手法を提案します。この手法は、条件と目標を表す環境の「ステータス」を収集し、それを用いてエージェントを生成します。これらのエージェントは特定の条件に基づいて相互接続され、柔軟性と一般性を兼ね備えたネットワークが構成されます。
提案手法で自動生成されたネットワークと手動で構築されたネットワークを比較する評価実験を行い、提案手法のネットワークの包括性と高い一般性を確認しました。本研究は、ロボティクス、自律走行車、スマートシステム、その他の複雑な環境に適用可能な多用途な計画手法の開発に向けた重要な進展を示しています。
論文の要約
1. はじめに
1.1 研究の背景
本研究では、動的環境に対する高い適応性を持つ計画手法の重要性を強調しています。自律的かつ多様なロボットの開発には、環境に応じた柔軟な計画生成が必要不可欠であり、これを実現するために大規模言語モデル(GPT-4o)を活用した自動ネットワーク生成手法を提案します。
1.2 提案手法の概要
提案手法は、環境の「ステータス」を収集し、それに基づいてエージェントを生成します。各エージェントは特定の条件に基づいて相互接続され、これにより柔軟性と一般性を兼ね備えたネットワークが形成されます。
2. 方法論
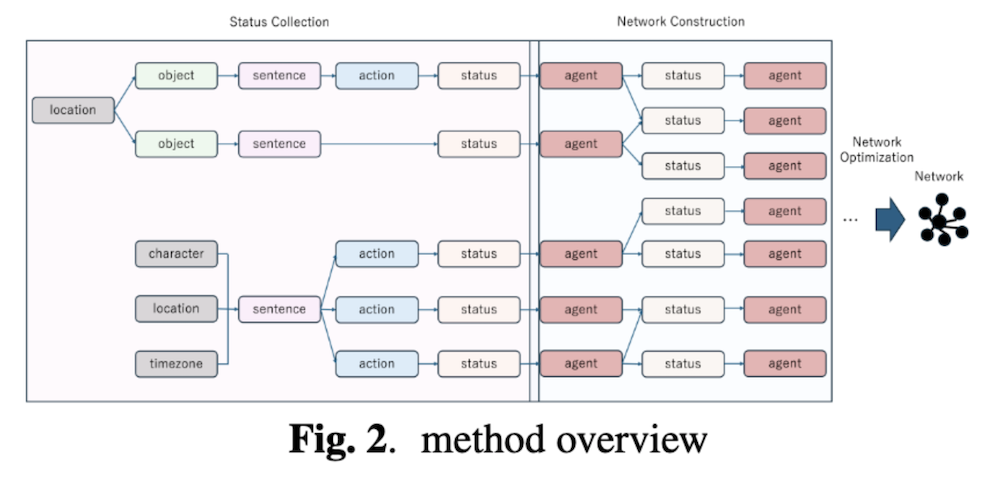
2.1 環境ステータスの収集
環境ステータスはリアルタイムのデータを基に収集され、動的な変化に対応するための基盤を提供します。このプロセスは、高度なセンサー技術とデータ処理アルゴリズムを用いて実施され、外的要因や内部の目標を考慮します。
2.2 エージェントの生成
収集した環境ステータスに基づき、エージェントは特定の役割と機能を持つように設計されます。これにより、エージェント同士の相互作用が促進され、全体としてのネットワークの効率が向上します。エージェントは環境の変化に応じて行動を調整する能力を有します。
2.3 ネットワークの構造
エージェントの接続は、環境の条件に応じて動的に行われます。この接続の柔軟性は、システム全体の一般性を高め、さまざまなシナリオに適応できることを意味します。提案手法では、具体的な接続ルールやアルゴリズムが示されています。
3. 実験と評価
3.1 実験設定
提案手法の有効性を評価するために、自動生成されたネットワークと手動で構築されたネットワークを比較する実験を実施しました。評価の結果、提案手法によるネットワークはその包括性と高い一般性が確認されました。
3.2 実験の結果
実験結果は、提案手法によって生成されたネットワークが、手動で構築されたものよりも高い一般性を持つことを示しています。特に、動的環境におけるエージェントの適応能力が顕著であり、ロボティクスや自律走行車両などの複雑なシステムへの応用が期待されます。
4. 結論
本研究は、動的環境に適応可能な計画手法の開発における重要な進展を示しています。特に、GPT-4oを活用した自動生成ネットワークの提案は、未来の多様な応用に向けた基盤を提供するものです。ロボティクス、スマートシステム、その他の複雑な環境に対する新たな計画手法の発展に寄与することが期待されます。